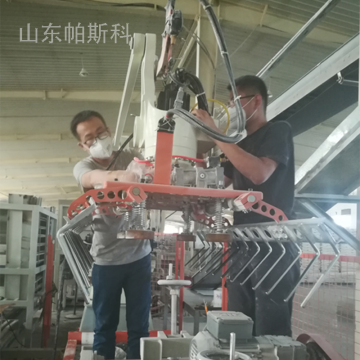
機械手主要由執(zhí)行機構(gòu)、驅(qū)動機構(gòu)和控制機構(gòu)三部分組成,執(zhí)行機構(gòu)是用來抓持工件的部件,根據(jù)被抓持物件的形狀和作業(yè)要求而有多種結(jié)構(gòu)形成,如挾持型、托持型和吸附型。驅(qū)動機構(gòu)。驅(qū)動手部完成各種轉(zhuǎn)動(擺動)移動或復(fù)合運動來實現(xiàn)規(guī)定的動作,改變被抓持物件的位置和姿勢。控制機構(gòu)主要利用可編程序控制器,微型計算機等控制驅(qū)動機構(gòu)動作,進而控制執(zhí)行機構(gòu)運動
。
免責(zé)聲明
本網(wǎng)頁所展示的有關(guān)【2018新款機械手】的信息/圖片/參數(shù)等由的會員【東光縣益豐機械有限公司
】提供,由圖頁網(wǎng)會員【東光縣益豐機械有限公司
】自行對信息/圖片/參數(shù)等的真實性、準(zhǔn)確性和合法性負責(zé),本平臺(本網(wǎng)站)僅提供展示服務(wù),請謹(jǐn)慎交易,因交易而產(chǎn)生的法律關(guān)系及法律糾紛由您自行協(xié)商解決,本平臺(本網(wǎng)站)對此不承擔(dān)任何責(zé)任。您在本網(wǎng)頁可以瀏覽【2018新款機械手】有關(guān)的信息/圖片/價格等及提供
【2018新款機械手】的商家公司簡介、聯(lián)系方式等信息。
在您的合法權(quán)益受到侵害時,請您致電0755-23444729,我們將竭誠為您服務(wù),感謝您對圖頁網(wǎng)的關(guān)注與支持!




























 第1年
第1年






 批量供應(yīng)輥漆機
批量供應(yīng)輥漆機
 河北廠家直銷單室真空鍍膜機
河北廠家直銷單室真空鍍膜機
 批量供應(yīng)烘干箱
批量供應(yīng)烘干箱
 河北益豐出售弧片玻璃切割機
河北益豐出售弧片玻璃切割機
 安全環(huán)保節(jié)能的真空鍍膜自動上油機
安全環(huán)保節(jié)能的真空鍍膜自動上油機
 安全性高的擴散泵電磁加熱
安全性高的擴散泵電磁加熱
 河北益豐出售擴散泵
河北益豐出售擴散泵









 手機圖頁網(wǎng)
手機圖頁網(wǎng)



