云控制系統(tǒng)結(jié)合了網(wǎng)絡(luò)化控制系統(tǒng)和云計(jì)算技術(shù)的優(yōu)點(diǎn),通過各種傳感器感知匯聚海量數(shù)據(jù),并將大數(shù)據(jù)儲存于云端,在云端利用深度學(xué)習(xí)等智能算法,實(shí)現(xiàn)系統(tǒng)的在線辨識與建模,結(jié)合網(wǎng)絡(luò)化預(yù)測控制、數(shù)據(jù)驅(qū)動控制等先進(jìn)控制方法實(shí)現(xiàn)系統(tǒng)的自主智能控制。本文介紹了云控制系統(tǒng)的初級形式與深度形式,給出了一種云控制系統(tǒng)雛形和一種簡單的協(xié)同云控制系統(tǒng),分析了云控制系統(tǒng)的優(yōu)勢與面臨的挑戰(zhàn),進(jìn)而探析了云控制系統(tǒng)的應(yīng)用前景。
在過去十年中,網(wǎng)絡(luò)技術(shù)取得顯著發(fā)展,越來越多的網(wǎng)絡(luò)技術(shù)應(yīng)用于控制系統(tǒng),形成了網(wǎng)絡(luò)化控制系統(tǒng),它是控制理論的一個新領(lǐng)域。
物聯(lián)網(wǎng)利用局部網(wǎng)絡(luò)或互聯(lián)網(wǎng)等通信技術(shù)來實(shí)現(xiàn)物物互聯(lián)、互通、互控,進(jìn)而建立了高度交互和實(shí)時響應(yīng)的網(wǎng)絡(luò)環(huán)境。網(wǎng)絡(luò)化控制理論在物聯(lián)網(wǎng)技術(shù)的快速發(fā)展中發(fā)揮了關(guān)鍵作用。我們可以通過傳感器技術(shù),檢測對象物理狀態(tài)的變化,獲取各種測量值,最終產(chǎn)生需要儲存的海量數(shù)據(jù)。伴隨著物聯(lián)網(wǎng)的發(fā)展,能夠獲取到的數(shù)據(jù)將會越來越多,控制系統(tǒng)必須能夠處理這些海量數(shù)據(jù)。控制系統(tǒng)中的海量數(shù)據(jù)將會增加網(wǎng)絡(luò)的通信負(fù)擔(dān)和系統(tǒng)的計(jì)算負(fù)擔(dān)。在這種情況下,傳統(tǒng)的網(wǎng)絡(luò)化控制技術(shù)難以滿足高品質(zhì)和實(shí)時控制的要求。
為了解決這個問題,筆者提出一個新概念——云控制系統(tǒng) (Cloud Control Systems,CCSs),它結(jié)合了網(wǎng)絡(luò)化控制系統(tǒng)和云計(jì)算技術(shù)的優(yōu)點(diǎn),在這個新的控制拓?fù)浣Y(jié)構(gòu)中,控制的實(shí)時性因?yàn)樵朴?jì)算的引入得到保證,通過各種傳感器感知匯聚而成的海量數(shù)據(jù),也即大數(shù)據(jù)儲存在云端,在云端利用深度學(xué)習(xí)等智能算法,實(shí)現(xiàn)系統(tǒng)的在線辨識與建模,結(jié)合網(wǎng)絡(luò)化預(yù)測控制、數(shù)據(jù)驅(qū)動控制等先進(jìn)控制方法實(shí)現(xiàn)系統(tǒng)的自主智能控制。
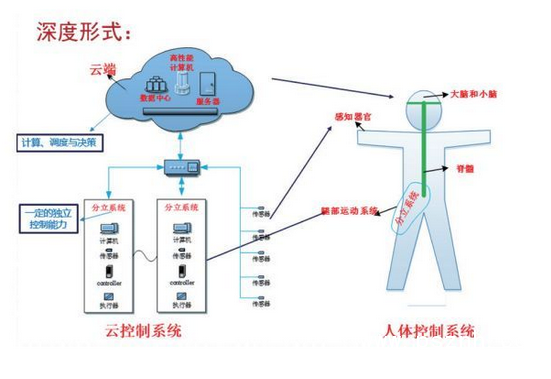
云控制系統(tǒng)是云計(jì)算與信息物理系統(tǒng)的深度融合,但也非簡單的將云計(jì)算應(yīng)用到信息物理系統(tǒng)。

通過與人體控制系統(tǒng)的比較,可以形象地認(rèn)識云控制系統(tǒng)。云控制系統(tǒng)中各分立的小系統(tǒng)可以比作人體各個器官以及與之對應(yīng)的脊髓神經(jīng),將系統(tǒng)中的傳感器比作人體的感覺器官,將互聯(lián)網(wǎng)比作信號傳輸經(jīng)過的神經(jīng)網(wǎng)。正如膝跳反射的中樞在腰部脊髓,分立的小系統(tǒng)有自己獨(dú)立的控制能力。將云端比作脊椎以上的大腦和小腦,提供大部分或者高級的控制能力。正如大腦和脊髓神經(jīng)的計(jì)算運(yùn)行方式不同,云計(jì)算的方式和分立小系統(tǒng)的計(jì)算方式也不同,特殊的設(shè)計(jì)和組成能夠提供更強(qiáng)大或更優(yōu)化的計(jì)算能力,使系統(tǒng)更加智能化,功能更強(qiáng)。
(一)云控制系統(tǒng)的一個雛形
在我們的云控制系統(tǒng)雛形定義中,云控制分為兩個階段:初始階段(也稱網(wǎng)絡(luò)化控制階段)和云控制階段。
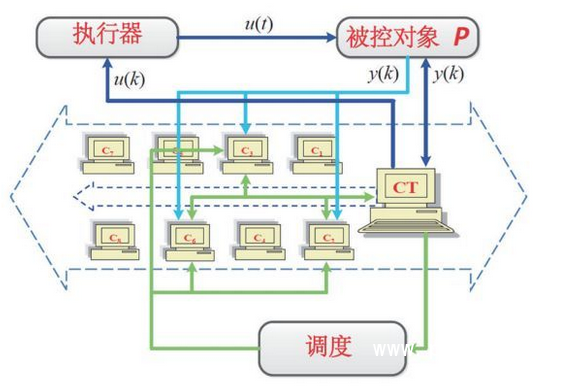
控制器接收來自被控對象的測量數(shù)據(jù),根據(jù)基于模型的網(wǎng)絡(luò)化預(yù)測控制算法,生成控制變量。在初始階段,云控制系統(tǒng)在預(yù)先定義的廣播域中僅僅包含兩個節(jié)點(diǎn);形式上實(shí)際上是一個網(wǎng)絡(luò)化控制系統(tǒng)。
任何一個云控制任務(wù)都從初始階段開始;在初始階段,控制系統(tǒng)被初始化為一個網(wǎng)絡(luò)化控制系統(tǒng),包含控制器 CT 和被控對象 P 兩個節(jié)點(diǎn)。
(二)云控制的控制流程

(1) 初始,CT 利用預(yù)先設(shè)定的控制算法,生成操作變量,并將封裝好的預(yù)測控制信號發(fā)送給被控對象;在自身管理范圍內(nèi),持續(xù)廣播控制需求,尋找可利用的節(jié)點(diǎn),替代自己完成控制任務(wù)。
(2) 評價云節(jié)點(diǎn)的優(yōu)先級 ( 優(yōu)先級越大,越適合提供服務(wù) )。
(3) 建立完優(yōu)先級列表后,控制節(jié)點(diǎn) CT 將從中選擇一些優(yōu)先級高的節(jié)點(diǎn),發(fā)送確認(rèn)信息。
(4) 當(dāng)某個或某些結(jié)點(diǎn)反饋確認(rèn)以后,控制節(jié)點(diǎn) CT 將向其發(fā)控制任務(wù)描述(控制算法等)。
(5) 同時,CT 也會將服務(wù)節(jié)點(diǎn)的信息發(fā)送給被控對象 P;P 接收到后,將開始向服務(wù)云節(jié)點(diǎn)發(fā)送(歷史)測量數(shù)據(jù)。
(6) 為了保持云控制系統(tǒng)的良好運(yùn)行,在每個采樣時刻,所有活動的云控制節(jié)點(diǎn)向節(jié)點(diǎn) CT發(fā)送反饋,如果節(jié)點(diǎn) CT 在一個預(yù)定時間內(nèi)沒有收到某個云控制節(jié)點(diǎn)的反饋,那么這個云控制節(jié)點(diǎn)應(yīng)該從列表中移除,并且節(jié)點(diǎn) CT 將指示所有閑置意愿節(jié)點(diǎn)中的第一個節(jié)點(diǎn)來代替移除節(jié)點(diǎn)。
(7) 與此同時,將這種替換告知節(jié)點(diǎn) P。云控制系統(tǒng)的管理是一個動態(tài)的過程,節(jié)點(diǎn) CT 不斷尋找意愿節(jié)點(diǎn),刪除并替換失效節(jié)點(diǎn)和發(fā)送當(dāng)前云控制節(jié)點(diǎn)的信息到節(jié)點(diǎn) P。節(jié)點(diǎn) P 可以接收來自不同云控制節(jié)點(diǎn)的控制信號數(shù)據(jù)包,補(bǔ)償器選擇最新的控制輸入作為被控對象的實(shí)際輸入。
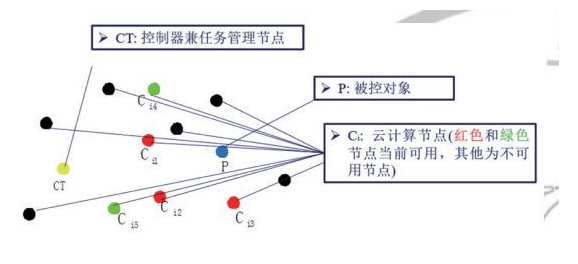
(三)協(xié)同云控制系統(tǒng)
考慮到單個意愿節(jié)點(diǎn)的實(shí)際運(yùn)算能力是有限的,同時為了縮短云端服務(wù)時間,在實(shí)際的控制實(shí)踐中,協(xié)同云控制系統(tǒng)將會變得非常有意義。在協(xié)同云控制系統(tǒng)中,控制任務(wù)將由多個意愿節(jié)點(diǎn)協(xié)同完成。下圖給出了協(xié)同云控制系統(tǒng)的一個簡單示意圖。